Curso: Controles Eléctricos y Automatización
Facultad: Ingeniería Electrónica UNMSM
Ciclo: 2011-I
Facultad: Ingeniería Electrónica UNMSM
Ciclo: 2011-I
1.- Objetivos
- Que el alumno se familiarice con el uso de los esquemas eléctricos de los diferentes tipos de arranques de motores trifásicos.
- Utilizar todos los dispositivos estudiados en lógica cableada.
2.- Requerimientos de herramientas y materiales
- Destornillador plano o estrella
- Alicate de punta
- Multímetro
- Extensión
- Cinta aislante
3.- Parte Experimental
3.1.- Inversor de marcha para un motor jaula de ardilla
Implemente el siguiente circuito

Elementos utilizados:
- 2 contactores
- 3 pulsadores (NA y NC)
Explique su funcionamiento:
Como se puede apreciar, este circuito sirve para invertir el giro de un motor trifásico, para tal efecto se emplea dos contactores, los cuales se encargaran de conmutar dos de las tres fases que van al motor para que pueda girar hacia la derecha o izquierda respectivamente.
El circuito de mando, hace uso de tres pulsadores para detener el motor (S0 NC), giro a la derecha (S1 NA) y giro a la izquierda (S2 NA). Prácticamente está compuesto de dos circuitos de enclavamiento, con una ligera modificación haciendo uso de los contactos auxiliares de los contactores. Si analizamos la etapa que realiza el giro a la derecha, nos daremos cuenta que está compuesto por el pulsador S1 en paralelo con el contacto auxiliar NA del contactor 1, y conectados en serie con el contacto auxiliar NC del contactor 2 y la bobina del contactor 1. Tal como se puede apreciar, el contacto auxiliar NC del contactor 2 se abrirá cuando la bobina de dicho contactor se encuentre energizada, evitando que la del contactor 1 se energice accidentalmente al pulsar S1.
Debido a que ambos circuitos tienen esta conexión cruzada como mecanismo de protección, si presionamos S1 cuando el motor se encuentra girando hacia la izquierda, el contacto auxiliar NC del contactor 2 se mantendrá abierto cuando la bobina del mismo esté energizada. Para invertir el giro, será necesario presionar el botón S0 y luego de esto presionar el botón S1 para que gire a la derecha. Sucederá lo mismo cuando al presionar S2 el motor se encuentre girando hacia la derecha.
Al presionar S0 NC, desconectaremos la energía del circuito sea cual sea el sentido de giro del motor.

Circuito de fuerza y de mando simulado en CADe SIMU
3.2.- Arranque de un motor por conmutación estrella-triángulo
Implemente el siguiente circuito

Elementos utilizados:
- 3 contactores
- 2 pulsadores (NA y NC)
- 1 temporizador ON DELAY
Explique su funcionamiento:
Este circuito sirve para arrancar motores trifásicos, cambiando el conexionado de los devanados del motor, primero en estrella y luego de un cierto tiempo en triángulo, con la única finalidad de producir un arranque que le permita al motor vencer la inercia con un bajo consumo de corriente. Una vez que el motor haya vencido la inercia en el modo estrella, el circuito de mando debe ser capaz de conmutar al modo triángulo de manera automática, para tal efecto se emplea un temporizador On Delay.
El circuito de mando consta de dos pulsadores para detener (S0 NC) y arrancar (S1) el motor. Una vez pulsado S1, las bobinas del contactor 1 y 3 quedarán energizadas y enclavadas, desde este momento el temporizador montado sobre el contactor 1 comenzará a contar. Cabe señalar, que el contacto auxiliar NC del contactor 3 se abrirá al pulsar S1, desconectando a la bobina del contactor 5 como medida de protección.
Una vez que el temporizador haya llegado al tiempo preestablecido, activará sus contactos auxiliares, siendo el NC en serie con la bobina del contactor 3, la que se abrirá originando que se cierre el contacto auxiliar NC del contactor 3, permitiendo que la bobina del contactor 5 se energice con lo que el arranque pase al modo triángulo. Como se puede apreciar la bobina del contactor 1 continua energizada al cambiar de modo.
Al presionar S0 NC, desconectaremos la energía del circuito sea cual sea el modo en el que se encuentre el motor.

Circuito de fuerza y de mando simulado en CADe SIMU
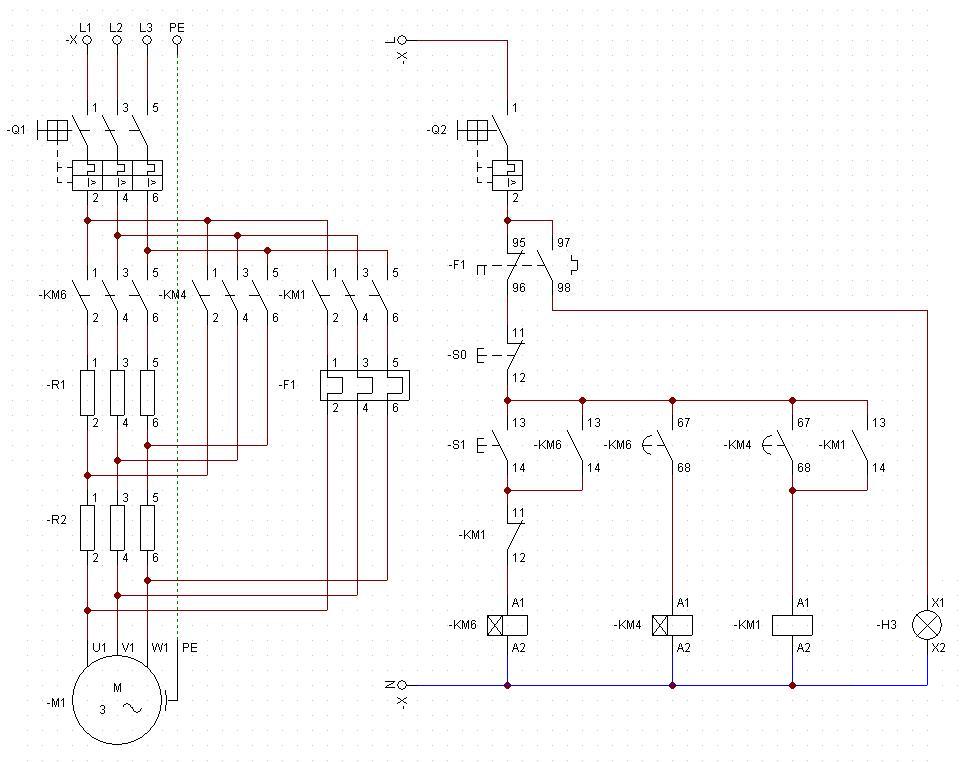
3.3.- Arranque de un motor por resistencia estatórica
Implemente el siguiente circuito

Elementos utilizados:
- 3 contactores
- 2 pulsadores (NA y NC)
- 2 temporizadores ON DELAY
Explique su funcionamiento:
Este tipo de arranque emplea un juego de resistencias conectadas al motor, con la finalidad de arrancar con una tensión reducida, dichas resistencias irán siendo el primer juego cortocircuitadas y el segundo desconectadas, de manera progresiva mediante el uso de temporizadores del tipo On Delay. Al final, el motor quedará conectado directamente a las líneas de fuerza trifásicas, donde podrá trabajar con la tensión de la red.
Para tal efecto, el circuito de mando emplea solo dos pulsadores para detener (S0 NC) y arrancar (S1) el motor. Al pulsar el botón S1, el contactor 6 queda enclavado y como tiene asociado al temporizador On Delay 6, este se activará después de un tiempo prefijado. Alcanzado dicho tiempo, el contacto auxiliar NA del temporizador 6, se cerrará energizando a la bobina del contactor 4 y activando el conteo del temporizador 4, aquí se ha cortocircuitado el primer grupo de resistencias.
Una vez alcanzado el tiempo del temporizador 4, el contacto auxiliar NA del temporizador 4, se cerrará energizando a la bobina del contactor 1, el cual quedará enclavado mediante el contacto auxiliar NA de dicho contactor y a su vez desconectará a través del contacto auxiliar NC al contactor 6 y por consiguiente al 4 por estar asociados. Luego de esto las resistencias quedan desconectadas y el motor queda conectado directamente a las fases de la red.
Al presionar S0 NC, desconectaremos la energía del circuito sea cual sea el modo en el que se encuentre el motor.
Circuito de fuerza y de mando simulado en CADe SIMU
4.- Cuestionario
4.1.- Defina que es neumática y cuales son sus aplicaciones en la industria.
La neumática es la tecnología que hace uso del aire comprimido como modo de transmisión de energía, la cual es necesaria para mover y hacer funcionar mecanismos. Debido a que el aire es un fluido elástico, cuando se le aplica una fuerza se comprime, mantiene dicha compresión y devuelve la energía acumulada cuando se le permite expandirse.
La neumática ayuda a las industrias a aumentar su flexibilidad y ritmo de producción gracias a las características del aire comprimido como medio transmisor y la adaptabilidad que permiten sus componentes.
Los actuadores neumáticos se utilizan eficientemente en aplicaciones industriales donde es preciso el control continuo de una magnitud (posicionado de cargas u obturadores de válvulas, control de movimiento o trayectoria, etc.) así como en procesos discontinuos de manipulado y automatización (cadenas de montaje, embaladoras, máquinas de packing, etc.).
4.2.- Investigue, dibuje y explique los símbolos neumáticos.
Cilindros:

Tratamiento del aire:

Válvulas:

Accionamientos:

Lógica:

4.3.- Indique que es un compresor de aire y cual es su función.
El compresor de aire es una máquina que permite almacenar, mediante un motor de bombeo, algún fluido gaseoso (por lo general aire) dentro de un tanque metálico cerrado. El fluido acumulado del tanque se encuentra bajo presión, por lo que cuenta con un mecanismo llamado presóstato, que le indica al motor cuando dejar de bombear una vez alcanzada la presión adecuada. Cuando se extrae el fluido a través de una válvula, la presión interna del tanque se reduce, activando nuevamente el presóstato para que encienda al motor de bombeo y así cargar nuevamente el tanque.
Para el caso de los sistemas neumáticos, el compresor de aire viene a ser la fuente que alimenta a los actuadores neumáticos, enviando el fluido bajo presión por medio de tuberías o mangueras especiales.
4.4.- Indique que es un manómetro y cual es su función.
Un manómetro es un instrumento que sirve para medir la presión de fluidos contenidos en recipientes cerrados. En el casó de la neumática, se emplea para medir la presión del aire almacenado dentro del compresor y en otras etapas del circuito neumático.
4.5.- Indique cuales son las ventajas de automatizar con equipos neumáticos.
Son empleados en situaciones en las cuales los motores eléctricos no son adecuados, tales como levantar cargas pesadas, prensado, etc. Los actuadores neumáticos proporcionan desplazamiento lineal, de giro, rotatorio y combinado.
Los motores eléctricos solo proveen movimiento por rotación y para poder mejorar la ventaja mecánica hay que agregar elemento mecánicos tales como piñones, engranes, tornillos sin fin, etc. que funcionan como reductores de velocidad.
Además, los motores eléctricos industriales no son adecuados, para realizar tareas en las cuales haya que encender, apagar o invertir el giro en periodos cortos de tiempo, debido a que al ser de gran tamaño, su reacción es lenta. Como hemos visto anteriormente, tienen que vencer la inercia del arranque, mientras que los actuadores neumáticos pueden realizar estas operaciones de manera instantánea.
4.6.- Indique marcas y modelos de equipos neumáticos.
Flowserve
Valtek
Actuadores de cilindro lineales de acero al carbono

Tyco Valves & Controls
Morin
Actuadores con muelle de retorno y doble acción

Numatics
ISO/VDMA Series
Actuador cilíndrico de doble acción

Bibliografía:
- Telemecanique (1999). Manual Electrotécnico Telesquemario Tecnologías de Control Industrial, España: Schneider Electric España, S.A. Cap. 2.
- De las Heras Jimémez, Salvador (2003). Instalaciones neumáticas, España: Editorial Universidad Oberta de Catalunya, Cap. 1.
- [En línea] http://olmo.pntic.mec.es/jmarti50/neumatica/neumatica.html [Consulta: junio 2011]






